
目次
この記事をシェア
※本記事は当初2022年6月28日に公開いたしましたが、最新の情報を反映するために2025年7月18日に改訂いたしました。
2022年2月、国際的科学誌「Nature」の表紙に一匹の小さな羽毛甲虫の写真が掲載された。この昆虫の飛行を研究する国際研究グループに参画していたのが、千葉大学工学研究院の劉浩教授。生物飛行の分野で世界をリードし、国際研究チームでもリーダーシップを発揮する劉教授は、2019年に設立されたインテリジェント飛行センター(CAIV)で既存の課題を克服する新しいドローンの開発を推進し、新たな産業創出を目指している。
劉教授の研究は昆虫や鳥の飛行の運動を観察し力学モデルを使って分析し、ものづくりに応用する、いわゆる「バイオミメティクス(Biomimetics)*」が基本にあり、得られた知見をドローンの制御やデザインに活用して賢いドローンを創生する研究に取り組んでいる。そのユニークさや可能性に注目が集まり各種メディアで多く取り上げられているが、具体的にどのような研究なのか、またこの分野の研究に至るまでの経緯や思いを伺った。
*生体の組織・機能を模倣して材料開発などに生かすアプローチ
日本初の生物飛行プロジェクトへの参加
私は現在千葉大学で生物機械工学、医工学を研究していますが、元は横浜国立大学の船舶海洋工学で学位を取りました。学位取得後は、主に計算流体力学の分野を基本に、旧運輸省の船舶技術研究所でタンカーが走るときの造波を、コンピューターシミュレーションを使いながら正確に解析するという研究をしていました。その後科学技術振興機構(JST)戦略的創造研究推進事業(ERATO)において、当時東京大学の河内啓二教授が発足、主宰した「河内微小流動プロジェクト」と呼ばれる国家プロジェクトに参加し、初めて生物の飛行、昆虫飛行についての研究に触れました。
日本でこのような昆虫飛行に特化した国家プロジェクトが立ち上がったのはこれが初めてのことでした。1993年より本プロジェクトに参加しましたが、このとき初めて昆虫の羽ばたき飛行への力学シミュレーションの研究に取り組み、1997年まで続けました。これは世界的に見ても生物飛行+コンピューターシミュレーションの先駆けだったと思います。
生物系のバイオメカニクス、予測医学、バイオミメティクスの3つの分野
その後名古屋工業大学と理化学研究所にて人体の循環器系、血流のシミュレーションを5年間研究、2003年からは千葉大学に移り、生物の飛行と遊泳及び生体のバイオメカニクスを研究し続け今日に至ります。その間バイオミメティクス分野にも関わり、羽ばたきロボット、生物を規範としたドローンのローターや、風車のブレードなどを開発しています。
現在、研究室では三つの研究を進めています。一つめは生物系。生物、虫の羽ばたきメカニズムを解明して次世代ロボットの開発に応用するもの。二つめは生体系。千葉大学の医学部をはじめとする医療関係者と共同で、心臓バイパス手術における血流を予測し、どのようにバイパスを設けるかなどの予測医学。そして三つめがバイオミメティクスで、生物が進化の結果獲得した優れた機能を次世代のドローンや流体機械などの開発に応用する、というものです。
生物飛行の制御機構の解明がこれからのカギ
私が生物飛行の分野に入って30年ほど経ちますが、この分野の国際会議に呼ばれてキーノートスピーチを行ったり、トップジャーナルのエディターを務めたりしており、この世界をリードしているという自負があります。こうした中でまず感じたのは、多様性と適合性に富んだ自然界の生物に学んでロボット技術に応用するということにおいて、人工物のシステムと自然界の生物のシステムはまるで違う、ということです。
生物のシステムを応用した次世代のロボットやドローンを開発しようとすると、現在の技術では外形を作ることはできても、昆虫や鳥のように自由自在に飛べるものは作れません。なぜなら生物は機械とは全く違う構造と制御システムを用いているからです。教科書にあるような制御理論は昆虫や鳥には当てはまらず、実現するには生物の独特な形態、柔軟な構造及び複雑な運動にあった制御システムを解明して、ハードに搭載しなくてはいけない。それが30年間携わってやっと最近分かったところです。
特に、どうしたら風が吹いている中でも安定した飛行を実現できるのかの解明が一番難しく、力を入れて研究を進めています。
三位一体のプラットフォームを開発、螺旋階段を昇るように解析を進めていく
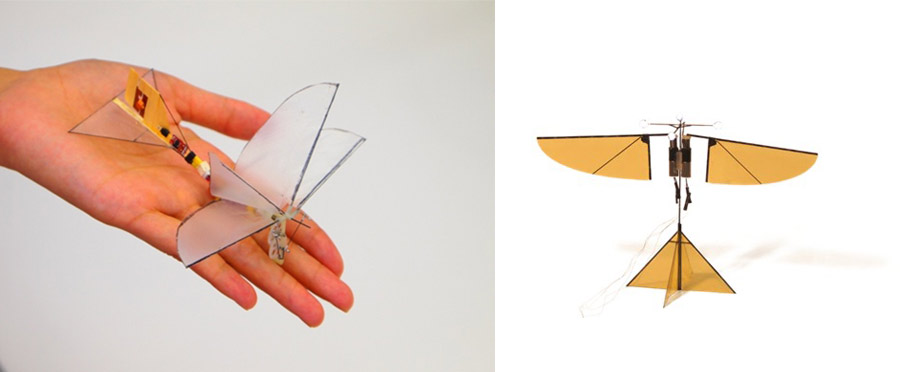
その方法として、三位一体のプラットフォームを開発しています。まずは自然界の昆虫の飛び方や羽の形状、あるいは運動などのリアルな動きを超高速カメラで「観察」すること。次にその結果をスーパーコンピューターでバーチャルモデルを作ってシミュレーションし、飛行性能を「解析」すること。最後に、ここで得られた知見を次世代ロボットの開発につなげる「ものづくり」をすること。この「観察」「解析」「ものづくり」を繰り返し回すことにより、螺旋階段を昇るように生物飛行の原理を解明しながら生物規範型ロボットの開発を進めています。
この研究の中で最も難しいのが神経系の理解です。昆虫の脳というのは哺乳類に比べて神経細胞が圧倒的に少ないにも関わらず、安定した飛行が可能です。なぜそのようなことができるかは未だ解明されていません。私は生物の羽ばたきにも自ら羽を動かす能動的な動きと、空気の流れを利用する受動的な動きがあり、おそらく虫たちにもこれが当てはまるのではないかという発想にもとづいた研究を行っています。
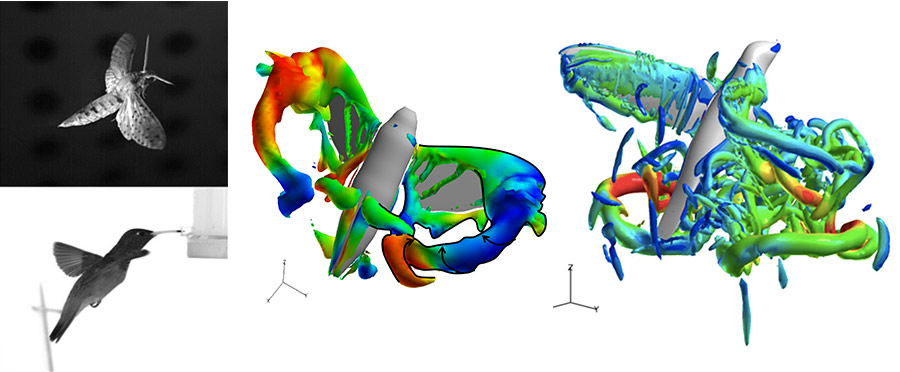
(H. Liu, J Comp Phys 2009, SE. Farisenkov et. al., Nature 2022, H. Liu et. al., Annu. Rev. Fluid Mech. 2024)
現在世界で行われているドローン開発では、プロペラを一方的に動かす能動的な動きのみしか取り入れていません。例えば人間は交感神経と副交感神経を持ち、これらを使い分けることで複雑な生理的な営みを実現しています。虫も同じで、能動的な羽ばたき運動を制御すると同時に、羽は空気の流れを受動的に利用するためにしなやかに変形しており、羽を動かす筋肉や骨格系も非常に柔らかく、能動的な動きを補助するような働きをしています。ドローンで再現するのなら、こうしたシステムを応用しなければいけないと考えています。虫たちはアクチュエーター(駆動装置)やセンサー(知覚機能)を持ち、こうした色々な要素を集めた「統合知能」を使い分けています。これこそが、今のドローンに欠けている部分なのです。
変化に富んだ生物の柔らかい構造は、非効率だからこそ安定している
最初に研究していた船舶海洋工学分野から生物の世界に入ったとき、全てが新しく奥深くて面白いと感じました。構造だけ見ても無機物と異なり生物は全てが柔らかい。硬い構造を制御する場合、一つインプットすれば一つのアウトプットがあります。しかし生物の柔らかい構造は非常に変化に富んでいて、一つインプットしてもどれだけのアウトプットがあるかが分からない。進化の結果、生物には能動的な部分と受動的な部分が同時に存在するようになり、それがスマートな構造を生み出しているのです。
そして、その構造はシステムとして非常に安定しています。また、さまざまな環境の変化に対応できるロバスト性が高いものです。さらに最近分かったことは、彼らのシステムは必ずしも「最適」ではないということです。(機械と違って)生物というのは子孫を残すことが最も重要なミッションです。力学の観念からは一見非効率的な動きをしているように見えても、系として安定し、かつ変化する環境に適応できれば種として生き延びることができるのです。だから彼らは効率の最大ピークではなく、平均で安定的で”そこそこ”の効率を取っているのです。
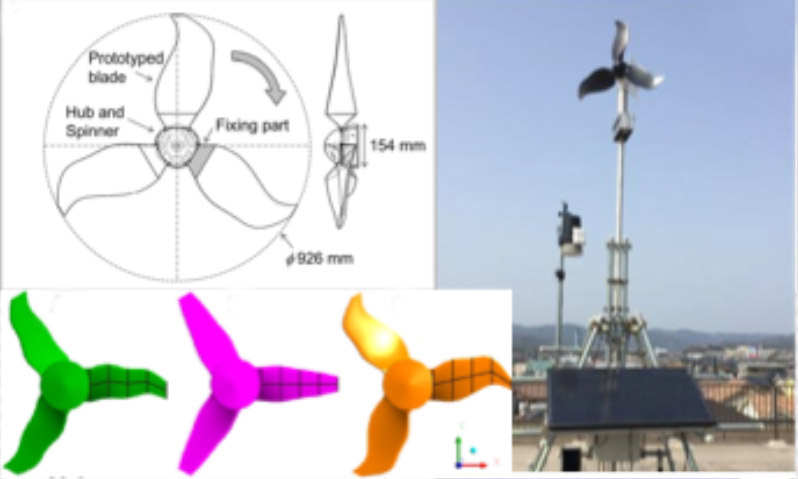
我々はこれをコンセプトにして、鳥を規範とした風車のブレードを開発しました。最高風速のところで最高効率を出すのではなく、24時間という長いスパンで平均的に高い効率を出すものです。開発したものはマイクロ風車ではありますが、従来のブレードの200%の発電量を出すことができます。ピークではなく、平均値を取って考えると結果として非常に良いものができる。つまり、最大効率を目指す従来の機械の設計方針と異なり、生物が進化した結果獲得した冗長性に富んだ設計思想が複雑で変化する環境に適合しているものなのです。
人々の暮らしに役立つ次世代ドローンに必要な三つの条件
「人々の暮らしに役立つドローン」という面では三つの条件があります。第一はどんな気候環境でも「落ちない」こと。宅配などで利用しても落ちてしまっては意味がありません。第二は騒音です。人体に害を及ぼすこともあるので、騒音レベルをいかに下げていくかが大きな課題です。第三は長距離、長時間飛べること。今の技術では30分ほどしかもたないのですが、例えば医薬品や血液などを遠方の患者の元へ運ぶには滞空時間が長くないといけません。私たちは回転翼以外に鳥のような固定翼をつけたハイブリッド型にすることで、滞空時間や飛行速度が上がるのではないかと考えています。
小さなドローンは回転翼では飛行を維持できない
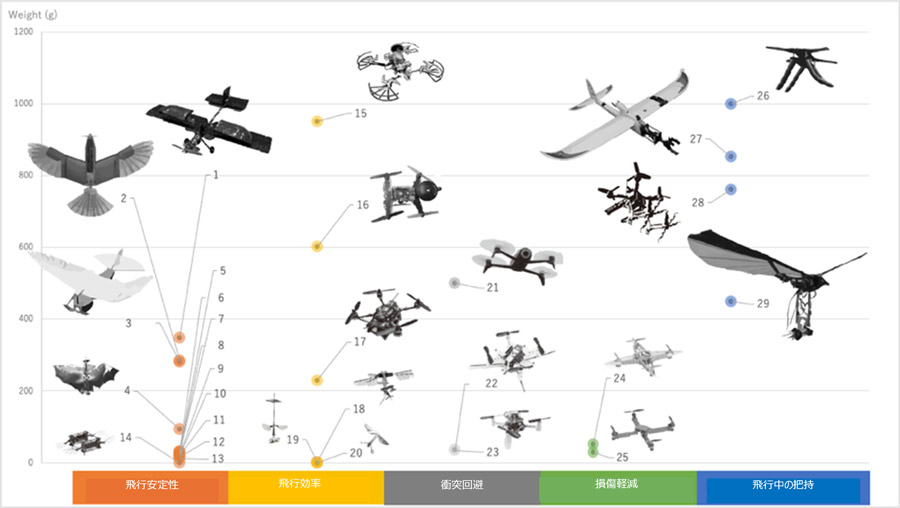
ドローンは基本的にヘリコプターのような多数の回転翼で飛びますが、昆虫や鳥は往復運動する翅(つばさ)の羽ばたきで飛んでいます。飛行体のサイズ・翼と飛行力学特性の関係を調べて分かったのは、翼を含め10cm以上になると人工回転翼の方が、逆にそれより小さいサイズになると羽ばたきの方が良い、ということでした。要するに翼が5cm以下の小さなドローンを作るのであれば、羽ばたき翼の方が安定していて、風があっても落ちないということです。ドローン分野の研究者たちは回転翼を使ってダウンサイジングの努力をしていますが、おそらく安定した飛行を維持できるものは作れないのではないかと思います。ただ、羽ばたき翼のものを作ろうとすると制御が難しいので、この問題は完全に解決されているわけではありません。
ドローンの応用に重要な騒音〜フクロウの羽に学ぶ
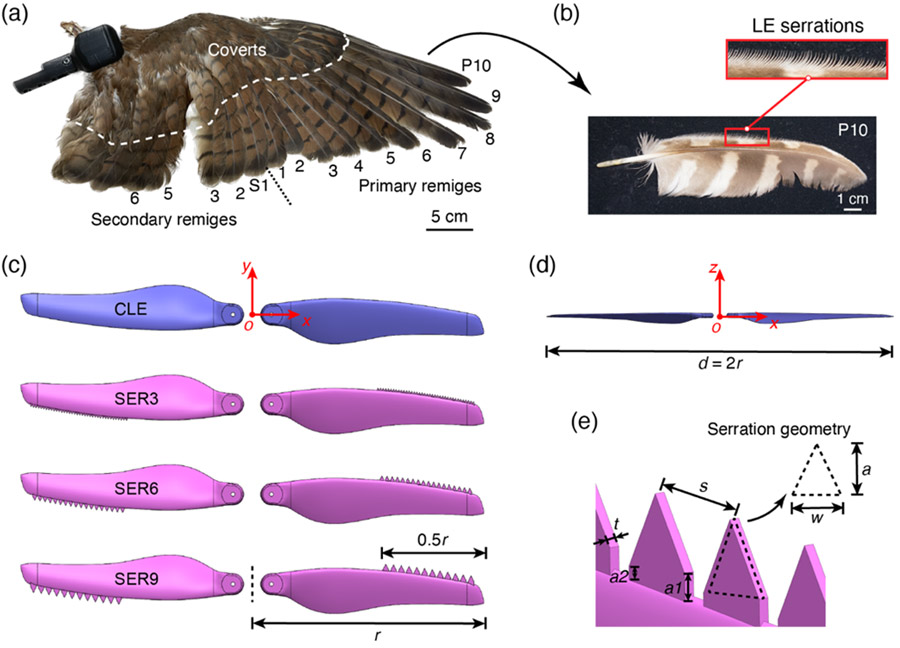
騒音レベルを下げることも重要です。市街地での応用を考えると、現在の大型ドローンは80db以上※1と非常にうるさい。そこで参考にしたのが、ほとんど音を立てずに飛ぶフクロウです。フクロウは、羽の表面構造などを利用して2,000Hz※2以上の音を大幅に低減しています。この仕組みが解明できれば、ドローンの騒音問題にも応用できるのではないかと考えています。現時点でのアウトプットとして、フクロウを規範としたドローンのローターを開発・実装し、騒音レベルを最大で10db下げることに成功しました。
※1: 80db: db(デシベル)は音の大きさのこと。80dbはゲームセンター店内のうるささ。
※2: 2,000Hz: Hz (ヘルツ)は音の高さのこと。2,000HZは赤ちゃんの声や警報音程度の高さ。
企業や研究者へ期待すること
生物の制御系、昆虫や鳥の飛行原理とそれらを実現する構造系・運動系・制御系に関わるソフトの部分をどうやって実現するかを研究してきましたが、それらをうまく利用できるハードを開発する企業を長い間探しています。そうした企業が見つかれば、我々の開発した三位一体のプラットフォームを使っていろいろなことを実現できます。ドローンだけでなく次世代のロボットに使える制御システム、そして最終的にはチップの開発までつなげたいと考えています。アクチュエーターやセンサーも必要で、これらを統合してロボットを作り上げる技術が必要になりますが、そういった技術を我々は持っていないので、企業の参入には大いに期待しています。
また若手のメカトロニクス系の研究者にも期待をしています。我々はアイデアをたくさん持っているのですが、ドローンに必要なソフトとハード両方の開発の技術を持っている人材が大学にはあまりおらず、こうした人材を求めています。
インテリジェント飛行センター(CAIV)では、生物規範、人工知能、デザインを軸とした基盤技術を研究開発し、知能的且つロバストな飛行ロボットやドローンへのイノベーションの創出を目指しています。また大学院博士後期課程における「インテリジェント飛行プログラム」はドローンに特化した博士後期課程プログラムで、これまでお話ししたようなバイオミメティクスや制御の話も組み込まれています。毎年学生とリサーチ・アシスタントを募集しており、社会人ドクターも大歓迎です。今後はさらにイノベーションの創出と人材育成を続け、次世代エアモビリティの世界をリードしていきたいと思います。
連載
創薬からドローン・宇宙まで〜バイオ研究最前線
SDGsの達成とQOL向上に必要不可欠なバイオテクノロジーの推進。バイオテクノロジーとライフサイエンス分野のトップリーダーたちが挑むユニークな研究とは?